活性胶体超机器:机器制造机器
2025-02-18 15:36:34
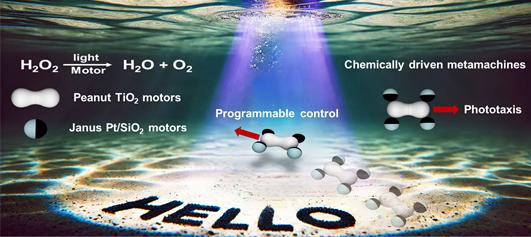
近日,贺强教授团队在活性胶体马达动态自组装的研究中取得了最新进展,通过调控不同化学驱动胶体马达间的非互易相互作用,实现了具有独特构型和特征运动学的活性胶体超机器的形状定向动态自组装。研究成果以《活性胶体超机器的形状定向动态自组装》(Shape-Directed Dynamic Assembly of Active Colloidal Metamachines)为题发表在《美国化学学会纳米杂志》(ACS Nano)上。该研究创新性地定量分析了不同化学驱动胶体马达间的非互易相互作用,并利用其选择性和方向性,促使胶体马达定向动态自组装形成活性胶体超机器,体现了“从机器制造机器”的前沿构筑理念。
ACS Nano 2025, 19, 4, 4754–4767.
该研究团队展示了花生状胶体马达和阴阳型球状胶体马达的自驱动运动、化学通信和定向自组装。并首次通过定量计算和数值模拟,获悉了不同化学驱动胶体马达之间流体动力相互作用、泳相互作用和渗透相互作用的影响距离。研究表明,花生状胶体马达的形状及反应性均会影响这些非互易相互作用的选择性和方向性,为活性胶体超机器的可控构筑提供了可能。此外,通过调控光场参数,实现了活性胶体超机器的可逆重构,并利用定制的结构光导航系统精确控制活性胶体超机器沿预定轨迹移动。研究证明了采用不同类型的活性胶体马达作为组装基元,可以制造出可重构的活性软材料和具有与生物系统相当的涌现特性的智能胶体超机器。
本研究获得国家自然科学基金重大项目和国科温州研究院启动项目的支持。
论文链接:https://doi.org/10.1021/acsnano.4c15465。




