面向可重构多功能智能材料的机器人物质
2024-10-18 16:27:51
提升材料的可重构性与多功能性以最大化物质的利用效率,对于减少制造、运输与降解过程的成本与促进科技进步都有着重要的作用,已成为发展先进智能材料领域的一大流行趋势,也是解决全球可持续发展问题的一条可行路径。尽管在研发新型的可重构多功能智能材料基本单元上已投入大量的努力,通过传统的生化方法以可控的成本与复杂性实现基本单元层级上的有效操控与分布式信息处理仍存在巨大的困难。为了应对这一挑战,本论文引入了“机器人物质”与“机器人-物质二元性”两个概念,并通过由上千个磁耦合的微型自旋机器人组成的集群进行了概念验证。

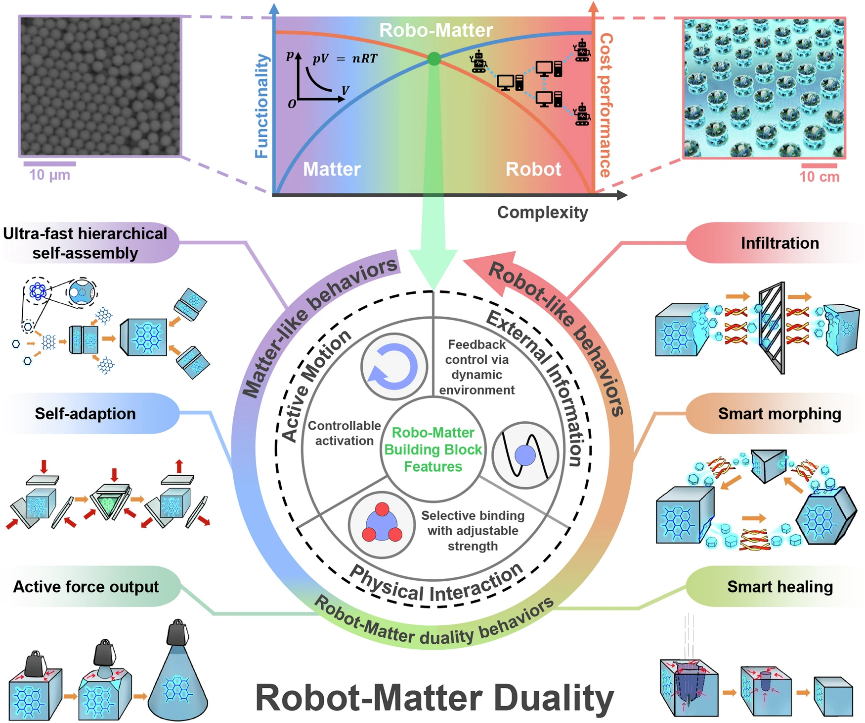
近日,刘雳宇团队联合亚利桑那州立大学焦阳教授在Nature Communications (IF:14.7)上发表题为Robo-Matter towards reconfigurable multifunctional smart materials的研究论文。研究团队通过设计并制造由上千个具备对称性破缺的主动运动模式、可调的各向异性相互作用并且与可编程的时空动态光场互动耦合的微型机器人基本单元组成的集群,对机器人物质系统这一概念进行了实验验证与自组织行为研究,并发现此机器人物质系统涌现出独特的“机器人-物质二元性”,即展现出包括快速自组装、自适应性等类物质性质与如主动力输出、智能修复、智能变形、灵活渗透等类机器人特性的一系列理想材料行为。这些结果表明机器人物质系统具备超越传统惰性与活性材料能力的广泛功能性与应用潜力。这一研究为下一代的智能材料与大规模机器人集群的设计提供了一个新的范例与方向。
图1 机器人物质系统的示意图
刘雳宇教授与亚利桑那州立大学焦阳教授为本文的共同通讯作者。国科温州研究院王璟副研究员、王高博士与陈怀城研究实习员为本文的共同第一作者。本研究获得了国家自然科学基金委、中国博士后科学基金与国科温州研究院启动基金的资助。



